在这样一个典型的汽车蓝牙低功耗PEPS架构中,有一个中央智能密钥模块和九个卫星模块。这里展示的九个卫星模块只是一个例子;真正实现时可以有更多或更少的附属模块。这些模块使用通信总线进行通信。
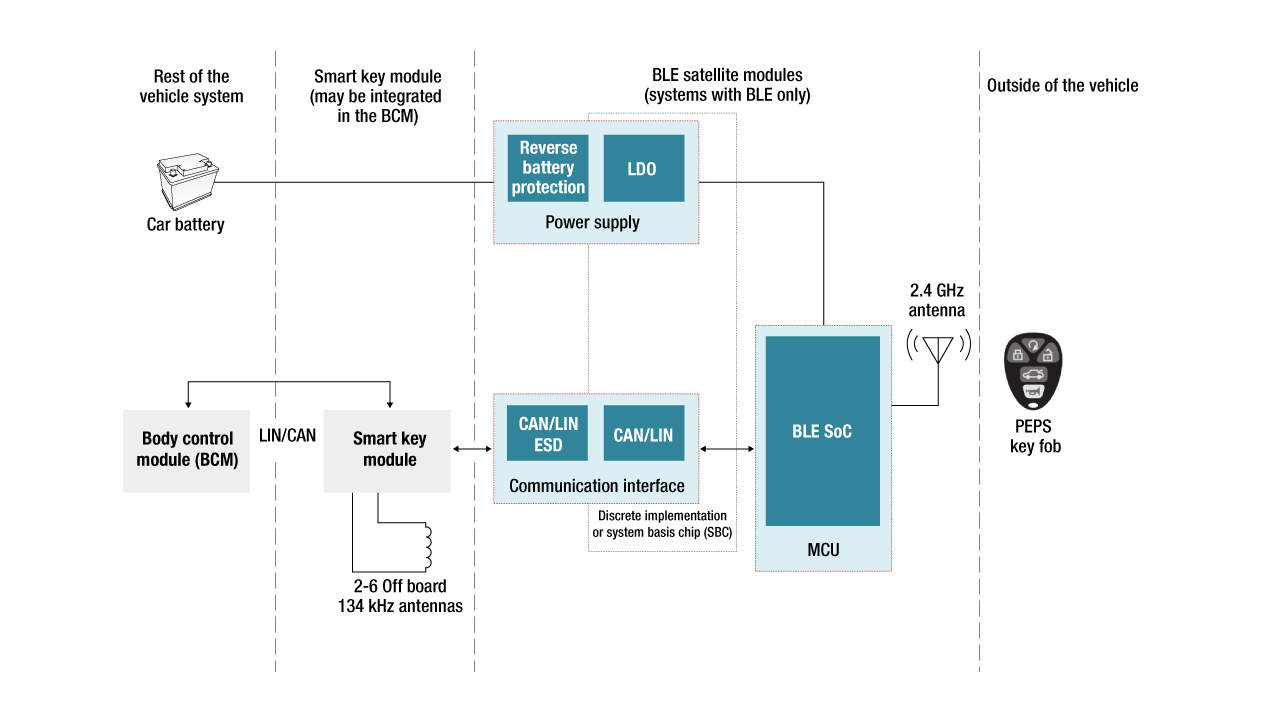
通信总线的选择
汽车PEPS系统中两种比较明显的通信总线结构是局域网(LIN)和控制器局域网(CAN);对于后者,可以采用经典CAN或CAN FD数据速率。LIN和CAN都是在汽车应用中广泛使用的标准通信协议。在LIN通信系统中的最大波特率是19.2 Kbps。经典CAN是1mbps和CAN FD可以高达5mbps。
LIN和CAN都可以使用消息帧作为建立通信协议的基础;两者最多可携带8个数据字节。具有8个数据字节的LIN消息帧是124位长,而标准CAN帧或CAN 2.0帧(包括帧间空间和假设最坏情况位填充)中的消息帧可以是135位。因此,一个LIN消息帧需要6.46毫秒来传输,而一个标准CAN消息帧只需要135毫秒来传输。
在LIN和CAN之间选择
正如这些计算所显示的,LIN消息帧比CAN消息帧花费的时间更长。所以你可能认为越快越好,选择CAN总线。然而,CAN总线是两线通信总线,而LIN总线是单线通信总线。这意味着基于CAN总线的系统比使用LIN总线的系统更昂贵,这意味着CAN总线可能不是最好的选择。
如何在这两种协议中选择?一种方法是分析需要传输的字节总数。如果蓝牙低能耗芯片在卫星节点上实现计算算法,则需要传输的字节数就会更少,因此LIN通信就足够了。另一方面,如果蓝牙低能量芯片不执行任何计算,而只是传输所有测量到的原始数据,那么需要传输更多字节,这就需要CAN架构。
另一个需要考虑的问题是电力消耗。基于LIN总线的节点通常比CAN总线在所有操作模式下消耗更少的电能。具体的功率消耗数字可在相应的收发器数据表中得到。
实现示例
TI公司的汽车蓝牙低能耗汽车接入卫星节点参考设计展示了一个基于lin的卫星板的实现。本参考设计采用TI公司的CC2640R2F-Q1作为蓝牙低功耗SoC, TLIN1029-Q1作为LIN总线收发器。
当你需要在智能密钥模块和蓝牙低能耗卫星模块之间交换大量数据时,经典的CAN或CAN FD总线架构是一个明显的选择。使用TI公司新的TCAN4550-Q1系统基础芯片(SBC),您可以很容易地向卫星节点添加can通信能力,该芯片集成了CAN FD控制器和收发器。除了集成控制器和收发器外,SBC是自备的;也就是说,不需要额外的电源设备。SBC提供了一个电压源来驱动印刷电路板中的其他组件,并有一个可作为SoC监视器的看门狗定时器。
下图显示了使用TCAN4550-Q1的卫星节点的可能实现,该实现利用了该设备中的特性。
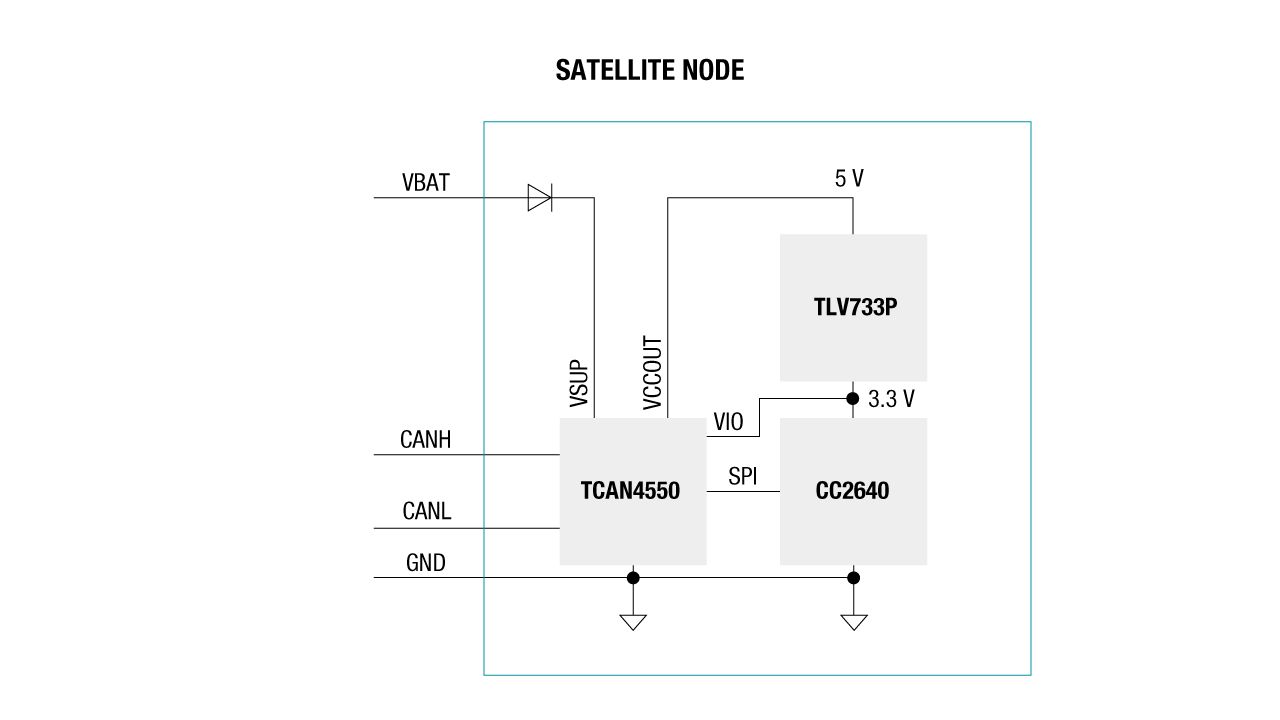
在上图中,使用TCAN4550-Q1的5-V输出作为TLV733P-Q1低VIN线性调节器的输入。该调节器可产生CC2640R2F-Q1低能量蓝牙SoC所需的3.3 V,无需使用宽VIN调节器为低能量蓝牙SoC供电。请注意,对于TCAN4550-Q1, 3.3-V调节器输出也用作VIO,因此无需在低功耗蓝牙SoC和TCAN4550-Q1之间使用电压级切换器。TCAN4550-Q1中的看门狗定时器也可以监控蓝牙低能SoC软件的执行情况。这种高度集成的SBC为蓝牙低能耗卫星节点提供了成本优化的解决方案。
TI的Car access Bluetooth®low energy + CAN卫星模块参考设计(tid -020032)演示了CAN- fd通信能力如何通过我们的蓝牙无线mcu实现,用于需要更高带宽的车载网络通信系统。
结论
设计工程师正在利用低能耗蓝牙技术在汽车上实现下一代PEPS系统。由于设计者要解决满足PEPS需求所需的最优节点数量的问题,因此通信总线架构在解决方案中发挥了重要作用。设计师可以选择LIN或者CAN进行交流。TI的LIN收发器和新推出的TCAN4550-Q1 SBC,以及蓝牙低功耗SoC和电源管理设备,不仅提供了完整的设备组合供选择,而且具有为汽车平台开发最优解决方案的灵活性。